Two Structures
Two Structures
From the paper Deep Residual Learning for Image Recognition we can find two possible structure:
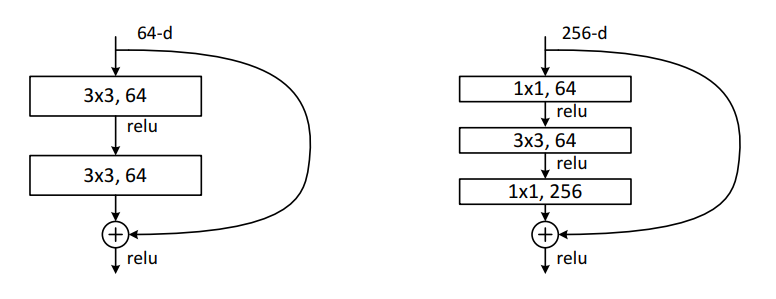
The left is called a basic block structure, and the right is called a bottleneck structure.
Basic Block Structure
Basic Block Structure
Reference: https://keras.io/examples/generative/cyclegan/
def residual_block( x, activation, kernel_initializer=kernel_init, kernel_size=(3, 3), strides=(1, 1), padding="valid", gamma_initializer=gamma_init, use_bias=False, ): dim = x.shape[-1] input_tensor = x x = ReflectionPadding2D()(input_tensor) x = layers.Conv2D( dim, kernel_size, strides=strides, kernel_initializer=kernel_initializer, padding=padding, use_bias=use_bias, )(x) x = tfa.layers.InstanceNormalization(gamma_initializer=gamma_initializer)(x) x = activation(x) x = ReflectionPadding2D()(x) x = layers.Conv2D( dim, kernel_size, strides=strides, kernel_initializer=kernel_initializer, padding=padding, use_bias=use_bias, )(x) x = tfa.layers.InstanceNormalization(gamma_initializer=gamma_initializer)(x) x = layers.add([input_tensor, x]) return x
Bottleneck Structure
Bottleneck Structure
For deeper network, we use:
def residual_block( x, filter_depth, strides=(1, 1), reduce_dim=False, reg=0.0001, bn_eps=2e-5, bn_mom=0.9 ): shortcut = x # we batch-normalize along the the channel axis, which is -1: bn = BatchNormalization(axis=-1, epsilon=bn_eps, momentum=bn_mom)(x) act = Activation("relu")(bn) x = Conv2D( int(filter_depth * 0.25), (1, 1), strides=strides, use_bias=False, kernel_regularizer=l2(reg) )(act) x = BatchNormalization(axis=-1, epsilon=bn_eps, momentum=bn_mom)(x) x = Activation("relu")(x) x = Conv2D( int(filter_depth * 0.25), (3, 3), strides=strides, padding="same", use_bias=False, kernel_regularizer=l2(reg) )(x) x = BatchNormalization(axis=-1, epsilon=bn_eps, momentum=bn_mom)(x) x = Activation("relu")(x) x = Conv2D( filter_depth, (1, 1), use_bias=False, kernel_regularizer=l2(reg) )(x) if reduce_dim: shortcut = Conv2D( filter_depth, (1, 1), strides=(2, 2), use_bias=False, kernel_regularizer=l2(reg) )(act) x = add([x, shortcut]) return x