Results
Results
Imports
Imports
import numpy as np import cv2 import tensorflow as tf import matplotlib.pyplot as plt import os import numpy as np import random from numpy.random import randint from tensorflow.keras.optimizers import Adam, RMSprop from tensorflow.keras.losses import MeanAbsoluteError, MeanSquaredError, CategoricalCrossentropy from tensorflow.keras.initializers import HeNormal from tensorflow.keras.preprocessing.image import img_to_array, load_img from tensorflow.keras.layers import ( Input, Conv2D, Conv2DTranspose, LeakyReLU, ReLU, Flatten, Dense, Activation, Concatenate, BatchNormalization, ZeroPadding2D ) from glob import glob from tensorflow.keras import activations from tensorflow.keras.models import Model from tqdm.notebook import tqdm from skimage.color import rgb2lab, lab2rgb from tensorflow.keras import initializers from tensorflow_addons.layers import InstanceNormalization, SpectralNormalization %matplotlib inline
Cuda
Cuda
os.environ['TF_XLA_FLAGS'] = '--tf_xla_enable_xla_devices' config = tf.compat.v1.ConfigProto( gpu_options=tf.compat.v1.GPUOptions(per_process_gpu_memory_fraction=0.8) ) config.gpu_options.allow_growth = True session = tf.compat.v1.Session(config=config) tf.compat.v1.keras.backend.set_session(session)
Constants
Constants
# ----- model config ----- dataset_dir = "./dataset_with_deepcrack" labels = ["crack"] weight_init = initializers.GlorotNormal() weight_regularizer = None image_shape = (224, 224, 3) noise_dim = (224,224,3) SIZE=image_shape[0] ch = 64 # default filter depth for the conv blocks n_dis = 6 # number of covolution in the block of discriminator c_dim = len(labels) + 1 # number of domains for image translation, crack, water_seepage, normal n_res = 6 # number of res_block in bottleneck of image-to-image module # ----- training config ----- buffer_size = 1000 batch_size=1 lr = 1e-4 n_disc_iteration = 1 # critic iteration before update of generator
Load DCT Dictionary and Mask
Load DCT Dictionary and Mask
U = tf.convert_to_tensor(np.load("./DCT_U.npy")) U_T = tf.convert_to_tensor(np.load("./DCT_U_T.npy")) energy_mask = tf.convert_to_tensor(np.load("./DCT_mask.npy")) DCT_U_ = tf.cast(U, tf.float32)[tf.newaxis, ...,tf.newaxis] DCT_U = tf.concat([DCT_U_] * 2352, axis=0) DCT_U_T_ = tf.cast(U_T, dtype=tf.float32)[tf.newaxis,...,tf.newaxis] DCT_U_T = tf.concat([DCT_U_T_] * 2352, axis=0) DCT_freq_domain_mask_ = tf.cast(energy_mask, dtype=tf.float32)[tf.newaxis,..., tf.newaxis] DCT_freq_domain_mask = tf.concat([DCT_freq_domain_mask_] * 2352, axis=0)
Model Definitions
Model Definitions
conv
conv
def conv(x_init, filters, kernel_size=4, strides=2, pad=0, pad_type='zero', use_bias=True, sn=False): x = ZeroPadding2D(padding=(pad, pad))(x_init) if sn: w = tf.compat.v1.get_variable("kernel", shape=[kernel_size, kernel_size, x.get_shape()[-1], channels], initializer=weight_init, regularizer=weight_regularizer) x = Conv2D(input=x, filter=spectral_norm(w), strides=[1, strides, strides, 1], padding='VALID') if use_bias: bias = tf.get_variable("bias", [filters], initializer=tf.constant_initializer(0.0)) x = tf.nn.bias_add(x, bias) else: x = Conv2D(filters, kernel_size=(kernel_size,kernel_size), kernel_initializer=weight_init, kernel_regularizer=weight_regularizer, strides=(strides,strides), use_bias=use_bias)(x) return x
deconv
deconv
def deconv(x, filters, kernel_size=4, strides=2, use_bias=True): x = Conv2DTranspose(filters=filters, kernel_size=kernel_size, kernel_initializer=weight_init, kernel_regularizer=weight_regularizer, strides=strides, padding='same', use_bias=use_bias)(x) return x
discriminator
discriminator
def discriminator(): channel = ch input = Input(shape=(image_shape)) x = conv(input, channel, kernel_size=4, strides=2, pad=1, use_bias=True) x = LeakyReLU(0.01)(x) for i in range(1, n_dis): x = conv(x, channel * 2, kernel_size=4, strides=2, pad=1, use_bias=True) x = LeakyReLU(0.01)(x) channel = channel * 2 c_kernel = int(image_shape[0] / np.power(2, n_dis)) logit = conv(x, 1, kernel_size=3, strides=1, pad=1, use_bias=False) c = conv(x, c_dim, kernel_size=c_kernel, strides=1, use_bias=False) c = tf.reshape(c, shape=[-1, c_dim]) c = Dense(c_dim, activation="softmax")(c) model = Model(input, [logit, c]) return model
# Check shape: disc = discriminator() x = tf.random.normal((1,)+image_shape, 0, 1) print(disc(x)[0].shape) print(disc(x)[1].shape)
res_block
res_block
def res_block(x_in, filters, use_bias=True, scope='resblock'): input = x_in x = conv(input, filters, kernel_size=3, strides=1, pad=1, use_bias=use_bias) x = InstanceNormalization()(x) x = ReLU()(x) x = conv(x, filters, kernel_size=3, strides=1, pad=1, use_bias=use_bias) x = InstanceNormalization()(x) return x + input
down_sample
down_sample
def down_sample(x, scale_factor_h, scale_factor_w): _, h, w, _ = x.get_shape().as_list() new_size = [h // scale_factor_h, w // scale_factor_w] return tf.image.resize(x, new_size, method='nearest')
param_free_norm
param_free_norm
def param_free_norm(x, epsilon=1e-5): x_mean, x_var = tf.nn.moments(x, axes=[1, 2]) x_std = tf.sqrt(x_var + epsilon) return (x - x_mean) / x_std
spade
spade
def spade(segmap, x_init, filters=None, use_bias=True, sn=False) : x = param_free_norm(x_init) _, x_h, x_w, n_filters = x_init.get_shape().as_list() _, segmap_h, segmap_w, _ = segmap.get_shape().as_list() factor_h = segmap_h // x_h # 256 // 4 = 64 factor_w = segmap_w // x_w segmap_down = down_sample(segmap, factor_h, factor_w) segmap_down = conv(segmap_down, filters=128, kernel_size=5, strides=1, pad=2, use_bias=use_bias, sn=sn) segmap_down = ReLU()(segmap_down) segmap_gamma = conv(segmap_down, filters=filters, kernel_size=5, strides=1, pad=2, use_bias=use_bias, sn=sn) segmap_beta = conv(segmap_down, filters=filters, kernel_size=5, strides=1, pad=2, use_bias=use_bias, sn=sn) x = x * (1 + segmap_gamma) + segmap_beta return x
spade_resblock
spade_resblock
def spade_resblock(segmap, x_init, filters, use_bias=True, sn=False): channel_in = x_init.get_shape().as_list()[-1] channel_middle = min(channel_in, filters) x = spade(segmap, x_init, channel_in, use_bias=use_bias, sn=False) x = LeakyReLU(0.2)(x) x = conv(x, filters=channel_middle, kernel_size=3, strides=1, pad=1, use_bias=use_bias, sn=sn) x = spade(segmap, x, filters=channel_middle, use_bias=use_bias, sn=False) x = LeakyReLU(0.2)(x) x = conv(x, filters=filters, kernel_size=3, strides=1, pad=1, use_bias=use_bias, sn=sn) if channel_in != filters: x_init = spade(segmap, x_init, filters=channel_in, use_bias=use_bias, sn=False) x_init = conv(x_init, filters=filters, kernel_size=1, strides=1, use_bias=False, sn=sn) return x + x_init
adative_noise_multiplier
adative_noise_multiplier
def adative_noise_multiplier(z): x = Conv2D(32, (5,5), 2, padding="same")(z) x = ReLU()(x) x = Conv2D(64, (3,3), 2, padding="same")(x) x = ReLU()(x) x = Flatten()(x) x = Dense(128, activation="relu")(x) x = Dense(1, activation="sigmoid")(x) return x
generator
generator
def generator(): channel = ch x_in = Input(shape=image_shape) c_in = Input(shape=(image_shape[0], image_shape[1], c_dim)) z = Input(shape=noise_dim) lambda_z = adative_noise_multiplier(z) x = tf.concat([x_in, lambda_z * z], axis=-1) # in the past, c_in is of shape (c_dim,), now c_in has also the spacial information, therefore no need to tf.tile(c_in, [1, x_in.shape[1], x_in.shape[2], 1]) x = conv(x, channel, kernel_size=7, strides=1, pad=3, use_bias=False) x = InstanceNormalization()(x) x = ReLU()(x) # Down-Sampling for i in range(3): x = conv(x, channel*2, kernel_size=4, strides=2, pad=1, use_bias=False) x = InstanceNormalization()(x) x = ReLU()(x) channel = channel * 2 # Bottleneck for i in range(n_res): x = res_block(x, channel, use_bias=False) # Up-Sampling for i in range(3): # need to feed the spatial control map here x = deconv(x, channel//2, kernel_size=4, strides=2, use_bias=False) # spade normalization instead x = spade_resblock(c_in, x, channel//2) x = ReLU()(x) channel = channel // 2 pre_mask = conv(x, filters=1, kernel_size=7, strides=1, pad=3, use_bias=False) mask = Activation("sigmoid")(pre_mask) defect_overlay = conv(x, filters=3, kernel_size=7, strides=1, pad=3, use_bias=False) defect_overlay = tf.reshape(defect_overlay, (2352, 8, 8, 1)) defect_overlay = tf.einsum("oik...,okj...->oij...", tf.einsum("oikb,okjb->oijb", DCT_U_T, defect_overlay), DCT_U) defect_overlay = tf.einsum("oij...,oij...->oij...", DCT_freq_domain_mask, defect_overlay) defect_overlay = tf.einsum("oik...,okj...->oij...", tf.einsum("oik...,okj...->oij...", DCT_U, defect_overlay), DCT_U_T) defect_overlay = tf.reshape(defect_overlay, (224,224,3)) defect_overlay = Activation("tanh")(defect_overlay) model = Model([x_in, c_in, z], [defect_overlay, mask]) return model
Dataset Pipeline
Dataset Pipeline
Helper Functions
Helper Functions
one_hot
one_hot
def one_hot(index, length): zeros = np.zeros((length, )) zeros[index] = 1 return zeros
get_segment_and_spatialCatMap_and_defectOneHot_and_normalOnehot
get_segment_and_spatialCatMap_and_defectOneHot_and_normalOnehot
import glob def get_segment_and_spatialCatMap_and_defectOneHot_and_normalOnehot(segment_filepath, index): # only EagerTensor can be decoded as follows: index = int(bytes.decode(index)) segment_filepath = bytes.decode(segment_filepath) segment = img_to_array(load_img(segment_filepath, target_size=(SIZE,SIZE), color_mode="grayscale")) segment = np.where(segment>0.5, 1, 0) spatial_cat_map = np.zeros((SIZE, SIZE, c_dim)) # create spatial_categorical map from segmentation and index of the defect class for x in range(SIZE): for y in range(SIZE): if segment[x,y,0] > 0: spatial_cat_map[x,y,index] = 1 defect_onehot = one_hot(index, c_dim) normal_onehot = one_hot(c_dim-1, c_dim) # onehot with last entry as 1, else 0 return tf.convert_to_tensor(segment, dtype=tf.float32), \ tf.convert_to_tensor(spatial_cat_map, dtype=tf.float32), \ tf.convert_to_tensor(defect_onehot, dtype=tf.float32),\ tf.convert_to_tensor(normal_onehot, dtype=tf.float32)
path_to_img
path_to_img
import random def path_to_img(zipped_filepaths): normal_filepath = zipped_filepaths[0] defect_filepath = zipped_filepaths[1] segment_filepath = zipped_filepaths[2] defect_index = zipped_filepaths[3] normal = tf.io.read_file(normal_filepath) normal = tf.image.decode_png(normal, channels=3) normal = tf.image.resize(normal, (SIZE, SIZE)) normal = (normal/127.5) - 1 defect = tf.io.read_file(defect_filepath) defect = tf.image.decode_png(defect, channels=3) defect = tf.image.resize(defect, (SIZE, SIZE)) defect = (defect/127.5) - 1 segment, spatial_cat_map, defect_onehot, normal_onehot = tf.numpy_function( func=get_segment_and_spatialCatMap_and_defectOneHot_and_normalOnehot, inp=[segment_filepath, defect_index], Tout = [tf.float32, tf.float32, tf.float32, tf.float32] ) return (normal, defect, segment, defect_index, spatial_cat_map, defect_onehot, normal_onehot)
Final Dataset Generator: get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen
Final Dataset Generator: get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen
def get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen(random_segmentations=False): normals = [] defects = [] defect_segmentations = [] defect_indexes = [] for label in labels: index = labels.index(label) normals += glob.glob(f"{dataset_dir}/{label}/normal/*.jpg") defects += glob.glob(f"{dataset_dir}/{label}/defect/*.jpg") defect_segmentations += glob.glob(f"{dataset_dir}/{label}/defect_segmentation/*.png") if random_segmentations: random.shuffle(defect_segmentations) defect_indexes += [str(index)] * len(normals) # normals, defects, defect_segementations are all of the same length, just use one of them normal_defect_defectSeg = list(zip(normals, defects, defect_segmentations, defect_indexes)) dataset = tf.data.Dataset.from_tensor_slices(normal_defect_defectSeg)\ .map(path_to_img)\ .batch(batch_size)\ .shuffle(buffer_size)\ .cache() return iter(dataset)
def view_dataset_sample(): normals, defects, segments, indexes, spatial_cat_maps, _, _ = next(get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen()) # spatial_cat_map_[:,:,index] = segments for i in range(0, 1): normal = normals[i].numpy().astype("float32") defect = defects[i].numpy().astype("float32") segment = segments[i].numpy().astype("float32") spatial_cat_map = spatial_cat_maps[i] index = int(indexes[i]) label = labels[index] print("label", label) plt.figure(figsize=(6, 15)) plt.subplot(1, 3, 1) plt.imshow(((normal+1)*127.5).astype("uint8")) plt.subplot(1, 3, 2) plt.imshow(((defect+1)*127.5).astype("uint8")) plt.subplot(1, 3, 3) plt.imshow(spatial_cat_map[:,:,index]) view_dataset_sample()
Train Loop
Train Loop
Init Loss Util Functions
Init Loss Util Functions
mae = MeanAbsoluteError() cce = CategoricalCrossentropy()
def gradient_penality(critic, real_sample, fake_sample): epsilon = tf.random.normal([batch_size, 1, 1, 1], 0.0, 1.0) interpolated = epsilon * real_sample + (1 - epsilon) * fake_sample with tf.GradientTape() as gp_tape: gp_tape.watch(interpolated) critic_inter = critic(interpolated, training=True) grads = gp_tape.gradient(critic_inter, [interpolated])[0] norm = tf.sqrt(tf.reduce_sum(tf.square(grads), axis=[1, 2, 3])) penality = tf.reduce_mean((norm - 1.0) ** 2) return penality
Init Models
Init Models
gen = generator() disc = discriminator()
View Intermediate Performance
View Intermediate Performance
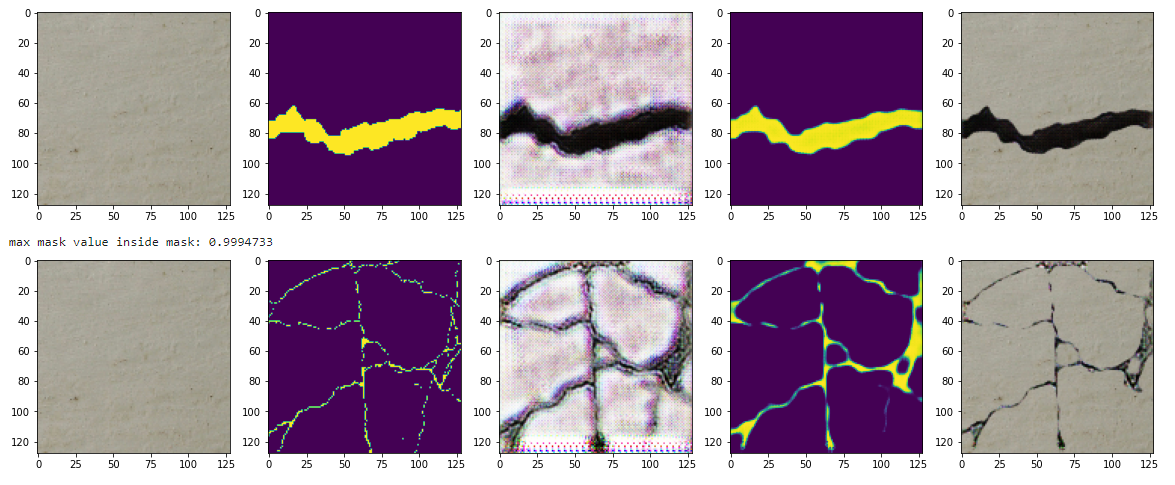
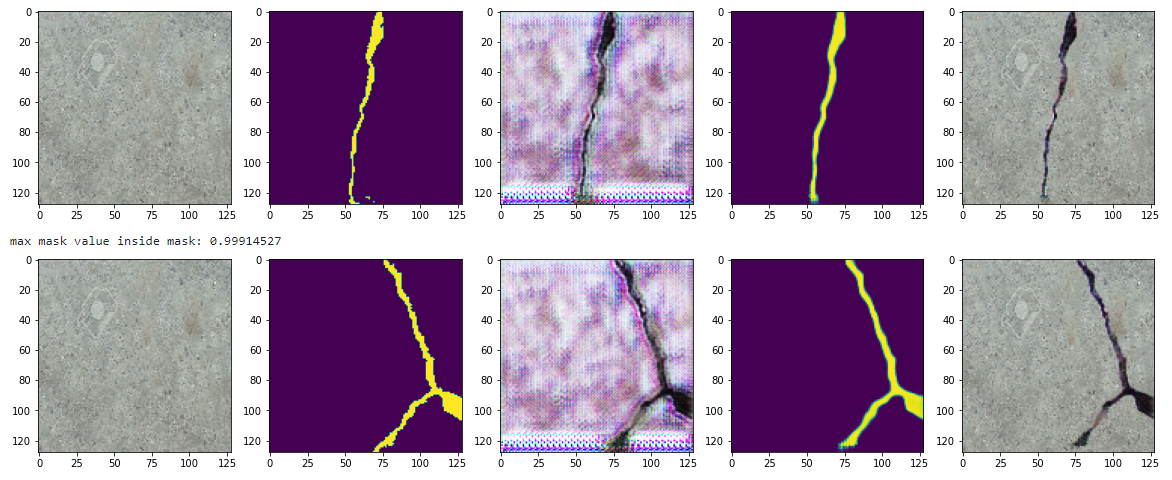
def view_generator_sample(image_name=None, show_in_notebook=True): datagen = get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen() dategen_randomSeg = get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen(random_segmentations=True) normals, defects, segments, indexes, spatial_cat_maps, _, _ = next(datagen) normals_, defects_, segments_, indexes_, spatial_cat_maps_, _, _ = next(dategen_randomSeg) # spatial_cat_map_[:,:,index] = segments if image_name is not None: print("") print("---------------------------------------------") print("---------") print(image_name) plt.figure(figsize=(17, 10)) for i in range(0, 1): spatial_cat_map_randomSeg = spatial_cat_maps_[i] spatial_cat_map = spatial_cat_maps[i] normal = normals[i].numpy().astype("float32") defect = defects[i].numpy().astype("float32") for row_count, (from_, spa_cat, description) in enumerate([ (defect, spatial_cat_map, "from_defect"), (normal, spatial_cat_map, "from_normal"), (normal, spatial_cat_map_randomSeg, "from_random_segment") ]): segment = segments[i].numpy().astype("float32") z = np.random.normal(0, 1, (1, )+noise_dim) top, m = gen.predict([from_[np.newaxis,...], spa_cat[np.newaxis,...], z]) top_layer = np.squeeze(top) index = int(indexes[i]) label = labels[index] plt.subplot(3, 5, 5*row_count + 1) plt.imshow(((from_+1)*127.5).astype("uint8")) plt.subplot(3, 5, 5*row_count + 2) plt.imshow(spa_cat[:,:,index]) plt.subplot(3, 5, 5*row_count + 3) plt.imshow(((top_layer+1)*127.5).astype("uint8")) plt.subplot(3, 5, 5*row_count + 4) print("max mask value inside mask:", np.amax(m)) plt.imshow(np.squeeze(m)) plt.subplot(3, 5, 5*row_count + 5) gened_defects = from_ * (1-m) + top_layer * m plt.imshow(((gened_defects[0]+1)*127.5).astype("uint8")) if image_name is not None: plt.savefig(f"{image_name}", dpi=80, bbox_inches="tight") if show_in_notebook: plt.show() view_generator_sample()
Train Loop Definition
Train Loop Definition
epoches=8 sample_per_batch=15 show_in_notebook=True # whether to show image in the notebook g_opt = Adam(lr=lr, beta_1=0, beta_2=0.9) d_opt = Adam(lr=lr, beta_1=0, beta_2=0.9) for epoch in range(epoches): batch = 0 dataset_gen = get_normal_defect_defectSegment_defectIndex_spatialCat_defectOneHot_normalOnehot_gen() if epoch >= 0 and epoch <= 2: lambda_mask = 5.0 elif epoch >= 3 and epoch <= 5: lambda_mask = 0.5 else: lambda_mask = 0 for normals, defects, _, _, spatial_cat_maps, defect_onehots, normal_onehots in dataset_gen: batch += 1 print("epoch", epoch+1, "batch", batch, "lambda_mask", lambda_mask, end="\r") for iteration in range(n_disc_iteration): update_gen = (iteration+1)%n_disc_iteration == 0 for from_, to_, from_onehots, target_onehots in [(normals, defects, normal_onehots, defect_onehots), (defects, normals, defect_onehots, normal_onehots)]: z_1 = tf.random.normal((1,)+noise_dim, 0, 1) z_2 = tf.random.normal((1,)+noise_dim, 0, 1) with tf.GradientTape(persistent=True) as tape: # naming convetion is from normal --> defect. Roles of normal and defect can be interchanged defect_overlays, n2d_masks = gen([from_, spatial_cat_maps, z_1], training=True) gened_defects = from_ * (1-n2d_masks) + defect_overlays * n2d_masks restore_overlays, d2n_masks = gen([gened_defects, spatial_cat_maps, z_2], training=True) restoration = gened_defects * (1-d2n_masks) + restore_overlays * d2n_masks d_logit_on_gened, d_cls_on_gened = disc(gened_defects, training=True) d_logit_on_real, d_cls_on_real = disc(from_, training=True) cls_loss_on_gened = cce(target_onehots, d_cls_on_gened) cls_loss_on_real = cce(from_onehots, d_cls_on_real) gp = gradient_penality(disc, from_, gened_defects) d_wgan_gp_loss = tf.math.reduce_mean(d_logit_on_gened) - tf.reduce_mean(d_logit_on_real) + 10 * gp g_cycle_loss = mae(from_, restoration) g_mask_cycle_loss = mae(n2d_masks, d2n_masks) g_mask_vanishing_loss = -tf.math.log(tf.math.reduce_mean(mae(n2d_masks, 0.0) + mae(d2n_masks, 0.0))) g_mask_spatial_constraint_loss = tf.math.reduce_mean(mae(n2d_masks, 0.0) + mae(d2n_masks, 0.0)) g_wgan_gp_loss = - tf.math.reduce_mean(d_logit_on_gened) d_loss = tf.tensordot( [1, 5.0 ], [d_wgan_gp_loss, cls_loss_on_real], axes = 1 ) if update_gen: g_loss = tf.tensordot( [10.0, 5.0, lambda_mask, 5.0, 10.0, 1.0 ], [g_cycle_loss, g_mask_cycle_loss, g_mask_vanishing_loss, g_mask_spatial_constraint_loss, cls_loss_on_gened, g_wgan_gp_loss], axes = 1 ) grad_of_d = tape.gradient(d_loss, disc.trainable_variables) d_opt.apply_gradients(zip(grad_of_d, disc.trainable_variables)) if update_gen: grad_of_g = tape.gradient(g_loss, gen.trainable_variables) g_opt.apply_gradients(zip(grad_of_g, gen.trainable_variables)) if (batch % sample_per_batch) == 0: view_generator_sample( image_name="epoch-{}-batch-{}-224-DCT-ver".format( str(epoch+1).zfill(3), str(batch).zfill(5) ), show_in_notebook=show_in_notebook )