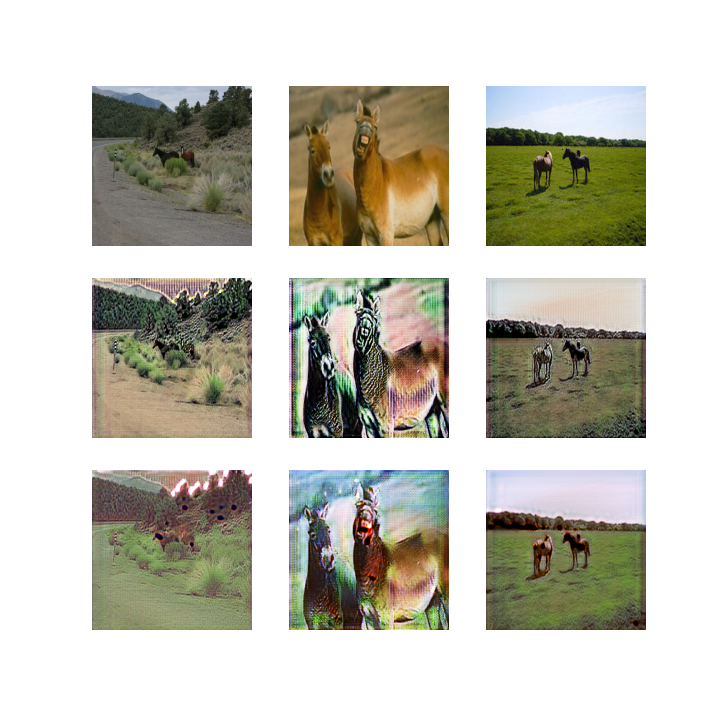
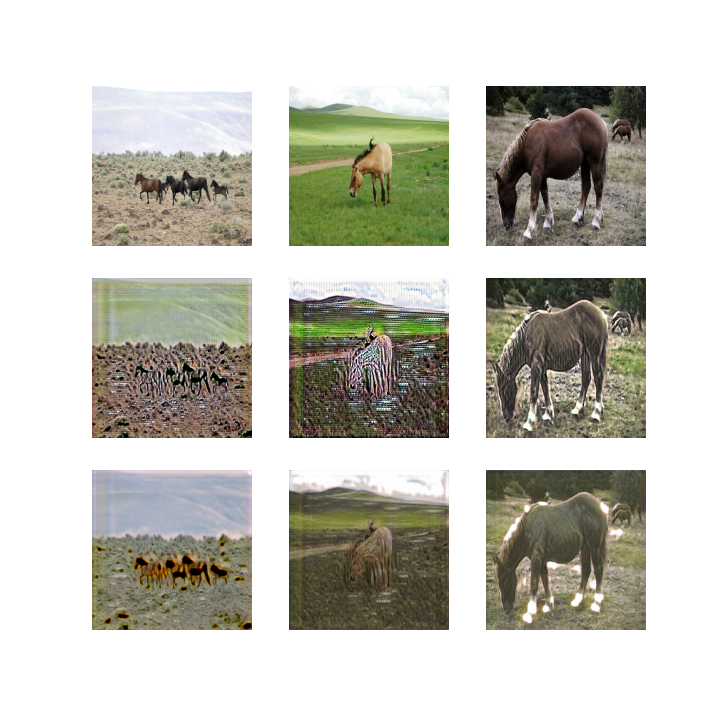
Results
With Gradient Tape, We Don't Need Model.training = False
I create this whole model following the video in reference 1) of Reference section, however, I never get the training work for any algorithm that involves train_on_batch (I am suspicious about that after certain version of tensorflow, the call Model.training = False before compiling models fails).
Nevertheless it is a very good exercise for me to write down the formula and implement the update of parameter by gradient tape because I have to know what's happening behind the scene clearly.
Hope you also enjoy writing down the explicit formula of the losses and updating the parameters to have the feeling of "training separately" (the reason for Model.training = False).
Preparation
For Cuda
In order to enable cuda for traininig using GPU some special script needs to be run at the beginning.
os.environ['TF_XLA_FLAGS'] = '--tf_xla_enable_xla_devices' config = tf.compat.v1.ConfigProto( gpu_options=tf.compat.v1.GPUOptions(per_process_gpu_memory_fraction=0.8 )) config.gpu_options.allow_growth = True session = tf.compat.v1.Session(config=config) tf.compat.v1.keras.backend.set_session(session)
Preliminary Import
%matplotlib inline from tensorflow.keras.models import Model import os import matplotlib.pyplot as plt import tensorflow as tf import numpy as np from tensorflow_addons.layers import InstanceNormalization from tensorflow.keras.layers import Input, Conv2D, Conv2DTranspose, LeakyReLU, Activation, Concatenate from tensorflow.keras.preprocessing.image import img_to_array, load_img from tensorflow.keras.initializers import RandomNormal from tensorflow.keras.losses import MeanAbsoluteError, MeanSquaredError from tensorflow.keras.optimizers import Adam from numpy.random import randint from numpy import load from numpy import zeros, ones, asarray from sklearn.utils import resample from random import random dataset_name = "horse2zebra" n_sample = 1000
Source of Training Data
https://people.eecs.berkeley.edu/~taesung_park/CycleGAN/datasets/
Formulas and Explanation
In cycle-GAN we have 4 models:
- , a generator from domain to domain
- , a generator from domain to domain
- , a discriminator model to discriminate images in domain
- , a discriminator model to discriminate images in domain
Here by "domain" we mean a category/class of images. For each training loop we will be training each of the models separately.
Denote the distribution of data in domain , and that in . In each loop mathematically we wish to minimize the loss:
Here
is called identitiy loss, is called cycle loss and is called generator's discriminator loss.
Unlike the simplest GANs, the result of discriminator is not a single value in any more, instead in this implementation we use a matrix of shape (None, 16, 16, 1). The negative logarithmic penality is replaced by mean-square loss (without taking root).
and are similarly defined, the code implementation of the can be found in implementation section of this article:
5 * mae(X_realA, same_inA) + 10 * mae(X_realA, cycle_A) + g_BtoA_disc_loss
Implementation
Helper Functions
def load_img_from_path(image_path): pixels = load_img(image_path, target_size=(256, 256)) pixels = img_to_array(pixels) pixels = pixels/127.5 - 1 return pixels def generate_real_samples(path, n_samples=n_sample, patch_shape=16): image_paths = np.array(get_image_paths(path)) indexes = randint(0, len(image_paths), n_samples) X = np.array([load_img_from_path(path) for path in image_paths[indexes]]) y = ones((n_samples, patch_shape, patch_shape, 1)) return X, y def generate_fake_samples(g_model, dataset, patch_shape=16): X = g_model.predict(dataset) y = zeros((len(X), patch_shape, patch_shape, 1)) return X, y def gen_dataset(n_sample=500): train_A_paths = get_image_paths(f"{dataset_name}/trainA") train_B_paths = get_image_paths(f"{dataset_name}/trainB") random_state = np.random.randint(0, 100) print("random_state", random_state) shuffle_indexes = resample(range(len(train_A_paths)), replace=False, n_samples=500, random_state=random_state) shuffled_trainA_img = (load_img_from_path(train_A_paths[index]) for index in shuffle_indexes) shuffled_trainB_img = (load_img_from_path(train_B_paths[index]) for index in shuffle_indexes) dataset = zip(shuffled_trainA_img, shuffled_trainB_img) return dataset def update_fake_img_pool(pool, images, max_size=50): selected = [] for image in images: if len(pool) < max_size: pool.append(image) selected.append(image) elif random() < 0.5: selected.append(image) else: # take one from the pool and and update the pool # the pool may contain new image that we never index = randint(0, len(pool)) selected.append(pool[index]) pool[index] = image return asarray(selected) def check_dataset(): dataset_ = gen_dataset() for i in range(3): img_A, img_B = next(dataset_) img_A = (img_A + 1) * 127.5 img_B = (img_B + 1) * 127.5 plt.subplot(2, 3, 1+i) plt.axis("off") plt.imshow(img_A.astype("uint8")) plt.subplot(2, 3, 4+i) plt.axis("off") plt.imshow(img_B.astype("uint8"))
Generators
def resnet_block(n_filters, input_layer): init = RandomNormal(stddev=0.02) # as strides = 1, the shape is invariant g = Conv2D(n_filters, (3, 3), padding="same", kernel_initializer=init)(input_layer) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) g = Conv2D(n_filters, (3, 3), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) g = Concatenate()([g, input_layer]) return g def define_generator(image_shape, n_resnet=9): init = RandomNormal(stddev=0.02) x = Input(shape=image_shape) g = Conv2D(64, (7, 7), padding="same", kernel_initializer=init)(x) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) g = Conv2D(128, (3, 3), strides=(2, 2), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) g = Conv2D(256, (3, 3), strides=(2, 2), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) for _ in range(n_resnet): g = resnet_block(256, g) g = Conv2DTranspose(128, (3, 3), strides=(2, 2), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) g = Conv2DTranspose(64, (3, 3), strides=(2, 2), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) g = Activation("relu")(g) g = Conv2D(3, (7, 7), padding="same", kernel_initializer=init)(g) g = InstanceNormalization(axis=-1)(g) y = Activation("tanh")(g) model = Model(x, y) return model
Discriminators
def define_discriminator(image_shape): init = RandomNormal(stddev=0.02) x = Input(shape=image_shape) d = Conv2D(64, (4, 4), strides=2, padding="same", kernel_initializer=init)(x) d = LeakyReLU(alpha=0.2)(d) d = Conv2D(128, (4, 4), strides=(2, 2), padding="same", kernel_initializer=init)(d) d = InstanceNormalization(axis=-1)(d) d = LeakyReLU(alpha=0.2)(d) d = Conv2D(256, (4, 4), strides=(2, 2), padding="same", kernel_initializer=init)(d) d = InstanceNormalization(axis=-1)(d) d = LeakyReLU(alpha=0.2)(d) d = Conv2D(512, (4, 4), strides=(2, 2), padding="same", kernel_initializer=init)(d) d = InstanceNormalization(axis=-1)(d) d = LeakyReLU(alpha=0.2)(d) d = Conv2D(512, (4, 4), padding="same", kernel_initializer=init)(d) d = InstanceNormalization(axis=-1)(d) d = LeakyReLU(alpha=0.2)(d) y = Conv2D(1, (4, 4), padding="same", kernel_initializer=init)(d) model = Model(x, y) return model
Custom Training Loop with Gradient Tape
Create Models
def update_fake_image_pool(pool, images, max_size=50): selected = [] for image in images: if len(pool) < max_size: pool.append(image) selected.append(image) elif random() < 0.5: selected.append(image) else: # take one from the pool and and update the pool # the pool may contain new image that we never index = randint(0, len(pool)) selected.append(pool[index]) pool[index] = image return asarray(selected) g_model_AtoB = define_generator(image_shape) g_model_BtoA = define_generator(image_shape) d_model_A = define_discriminator(image_shape) d_model_B = define_discriminator(image_shape) n_epochs, n_batch, = 100, 1 n_patch = d_model_A.output_shape[1] batch_per_epoch = int(n_sample/n_epochs) n_steps = batch_per_epoch * n_epochs def show_result(step): dataset_ = gen_dataset() fig = plt.figure() fig.set_figheight(10) fig.set_figwidth(10) for i in range(3): img_A, _ = next(dataset_) fake_B = g_model_AtoB.predict(np.array([img_A])) cycle_A = g_model_BtoA.predict(fake_B) img_A = (img_A + 1) * 127.5 fake_B = (fake_B[0] + 1) * 127.5 cycle_A = (cycle_A[0] + 1) * 127.5 plt.subplot(3, 3, 1+i) plt.axis("off") plt.imshow(img_A.astype("uint8")) plt.subplot(3, 3, 4+i) plt.axis("off") plt.imshow(fake_B.astype("uint8")) plt.subplot(3, 3, 7+i) plt.axis("off") plt.imshow(cycle_A.astype("uint8")) plt.savefig(f'result_{str(step).zfill(2)}.png') plt.show()
Start Training Loop
Note that in gradient tape we pass an option persistent=True because we need to calculate the gradient several times using the same tape (record of calculations).
mse = MeanSquaredError() mae = MeanAbsoluteError() g_AB_opt = Adam(learning_rate=0.0002, beta_1 = 0.5) g_BA_opt = Adam(learning_rate=0.0002, beta_1=0.5) d_A_opt = Adam(learning_rate = 0.0002, beta_1 = 0.5) d_B_opt = Adam(learning_rate=0.0002, beta_1=0.5) poolA = list() poolB = list() for i in range(2000): shfted_index = i + 4880 print(f"step {shfted_index}", end="\r") if shfted_index % 10 == 0: show_result(shfted_index) X_realA, y_realA = generate_real_samples(f"./{dataset_name}/trainA", n_batch, n_patch) X_realB, y_realB = generate_real_samples(f"./{dataset_name}/trainB", n_batch, n_patch) X_fakeA, y_fakeA = generate_fake_samples(g_model_BtoA, X_realB, n_patch) X_fakeB, y_fakeB = generate_fake_samples(g_model_AtoB, X_realA, n_patch) X_fakeA = update_fake_img_pool(poolA, X_fakeA) X_fakeB = update_fake_img_pool(poolB, X_fakeB) X_realA = tf.convert_to_tensor(X_realA) y_realA = tf.convert_to_tensor(y_realA) X_realB = tf.convert_to_tensor(X_realB) y_realB = tf.convert_to_tensor(y_realB) X_fakeA = tf.convert_to_tensor(X_fakeA) y_fakeA = tf.convert_to_tensor(y_fakeA) X_fakeB = tf.convert_to_tensor(X_fakeB) y_fakeB = tf.convert_to_tensor(y_fakeB) with tf.GradientTape(persistent=True) as tape: fake_B = g_model_AtoB(X_realA, training=True) cycle_A = g_model_BtoA(fake_B, training=True) fake_A = g_model_BtoA(X_realB, training=True) cycle_B = g_model_AtoB(fake_A, training =True) same_inB = g_model_AtoB(X_realB) same_inA = g_model_BtoA(X_realA) disc_real_A = d_model_A(X_realA) disc_fake_A = d_model_A(fake_A) disc_real_B = d_model_B(X_realB) disc_fake_B = d_model_B(fake_B) g_AtoB_disc_loss = mse(y_realB, disc_fake_B) g_BtoA_disc_loss = mse(y_realA, disc_fake_A) total_g_AtoB_loss = 5 * mae(X_realB, same_inB) + 10 * mae(X_realB, cycle_B) + g_AtoB_disc_loss total_g_BtoA_loss = 5 * mae(X_realA, same_inA) + 10 * mae(X_realA, cycle_A) + g_BtoA_disc_loss # train discriminator and generator separately: disc_B_loss = 0.5 * (mse(y_realB, disc_real_B) + mse(y_fakeB, disc_fake_B)) disc_A_loss = 0.5 * (mse(y_realA, disc_real_A) + mse(y_fakeA, disc_fake_A)) # derivatives grad_d_A = tape.gradient(disc_A_loss, d_model_A.trainable_variables) grad_d_B = tape.gradient(disc_B_loss, d_model_B.trainable_variables) grad_g_AtoB = tape.gradient(total_g_AtoB_loss, g_model_AtoB.trainable_variables) grad_g_BtoA = tape.gradient(total_g_BtoA_loss, g_model_BtoA.trainable_variables) # back-propagate d_A_opt.apply_gradients(zip(grad_d_A, d_model_A.trainable_variables)) d_B_opt.apply_gradients(zip(grad_d_B, d_model_B.trainable_variables)) g_AB_opt.apply_gradients(zip(grad_g_AtoB, g_model_AtoB.trainable_variables)) g_BA_opt.apply_gradients(zip(grad_g_BtoA, g_model_BtoA.trainable_variables))
Reference
-
Unpaired image to image translation using cycleGAN in keras,
https://www.youtube.com/watch?v=2MSGnkir9ew -
Tensoflow's guide to CycleGAN,
https://www.tensorflow.org/tutorials/generative/cyclegan -
Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks,
https://arxiv.org/abs/1703.10593